UW ENGINE 2021: Spherical Drive Robotic Control
University of Washington, Seattle
01/2021 - 06/2021
Keywords: PID controller, Adafruit 6-DOF IMU sensor, Arduino, Solidworks, 3D printing, Hardware prototyping, Project lead

Role
Impacts
Skills
Descriptions
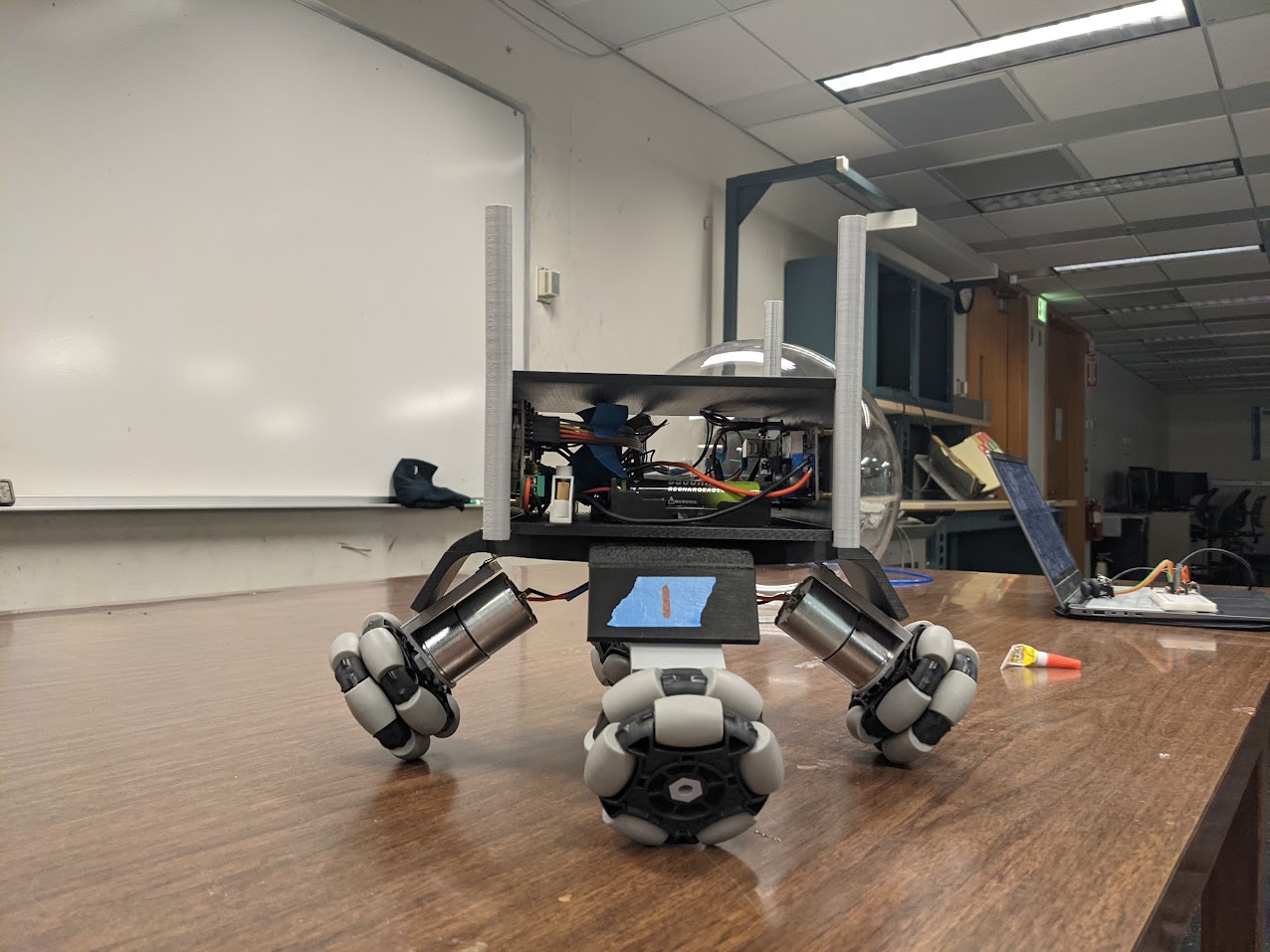
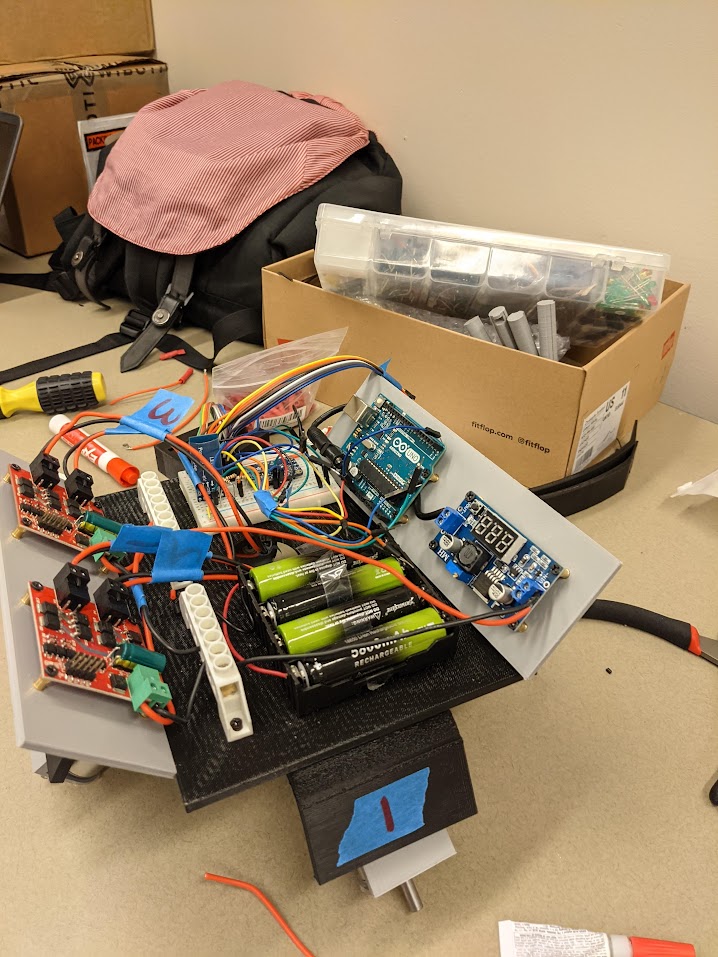
The omnidirectional robot was equipped with an Arduino Uno as the main computing SoC.
It is capable of balancing itself on top of spheres with any sizes. We implemented a PID controller
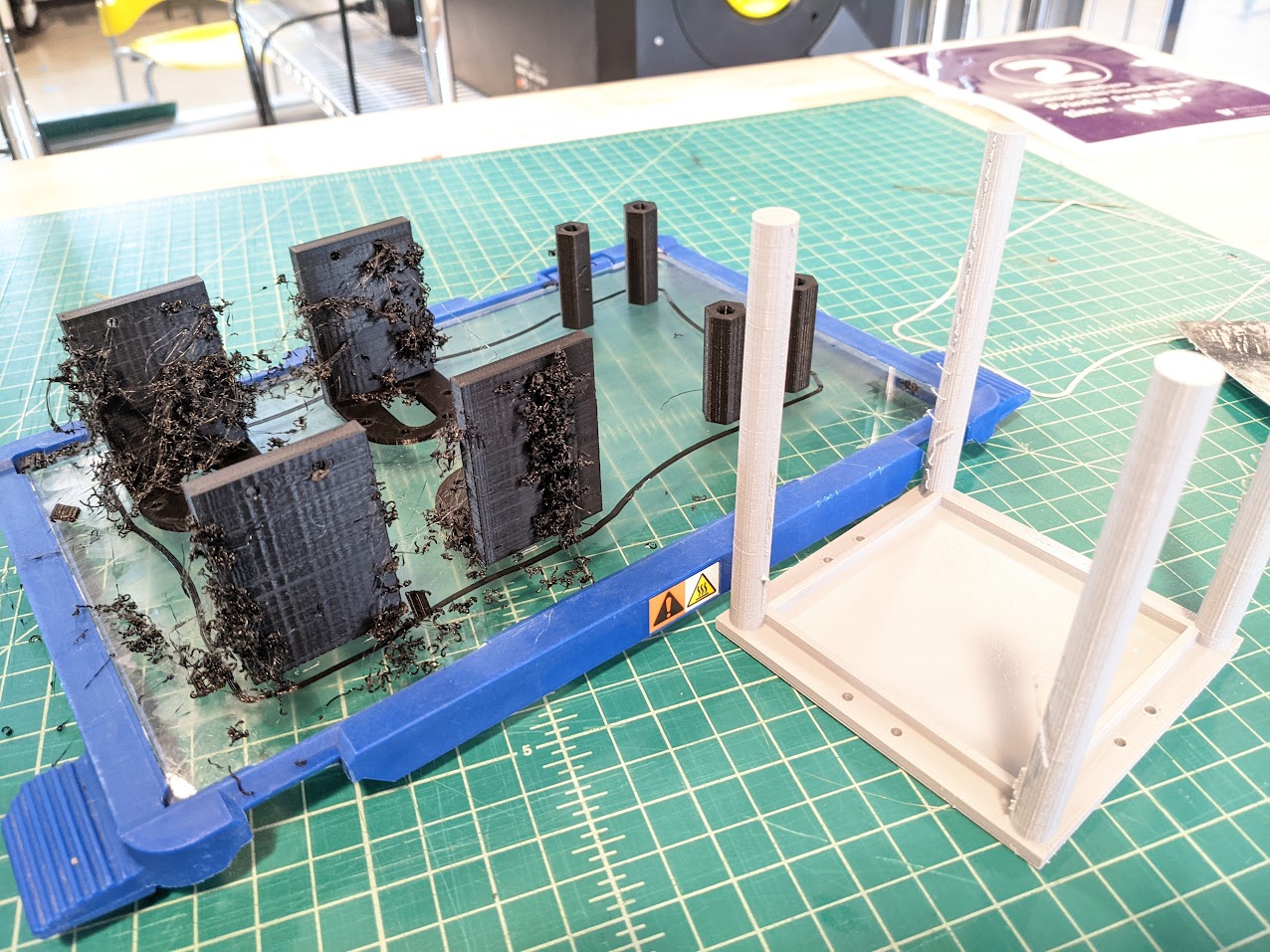
with a feedback loop using Adafruit's 6-DOF IMU sensor. The chassis of the robot was 100% designed
from scratch and was built from 3D printers.
As the lead, I was responsible to organize the weekly meetings with our sponsors and faculty.
I also managed the budgets and expenses and discussed concrete goals with each member every week.