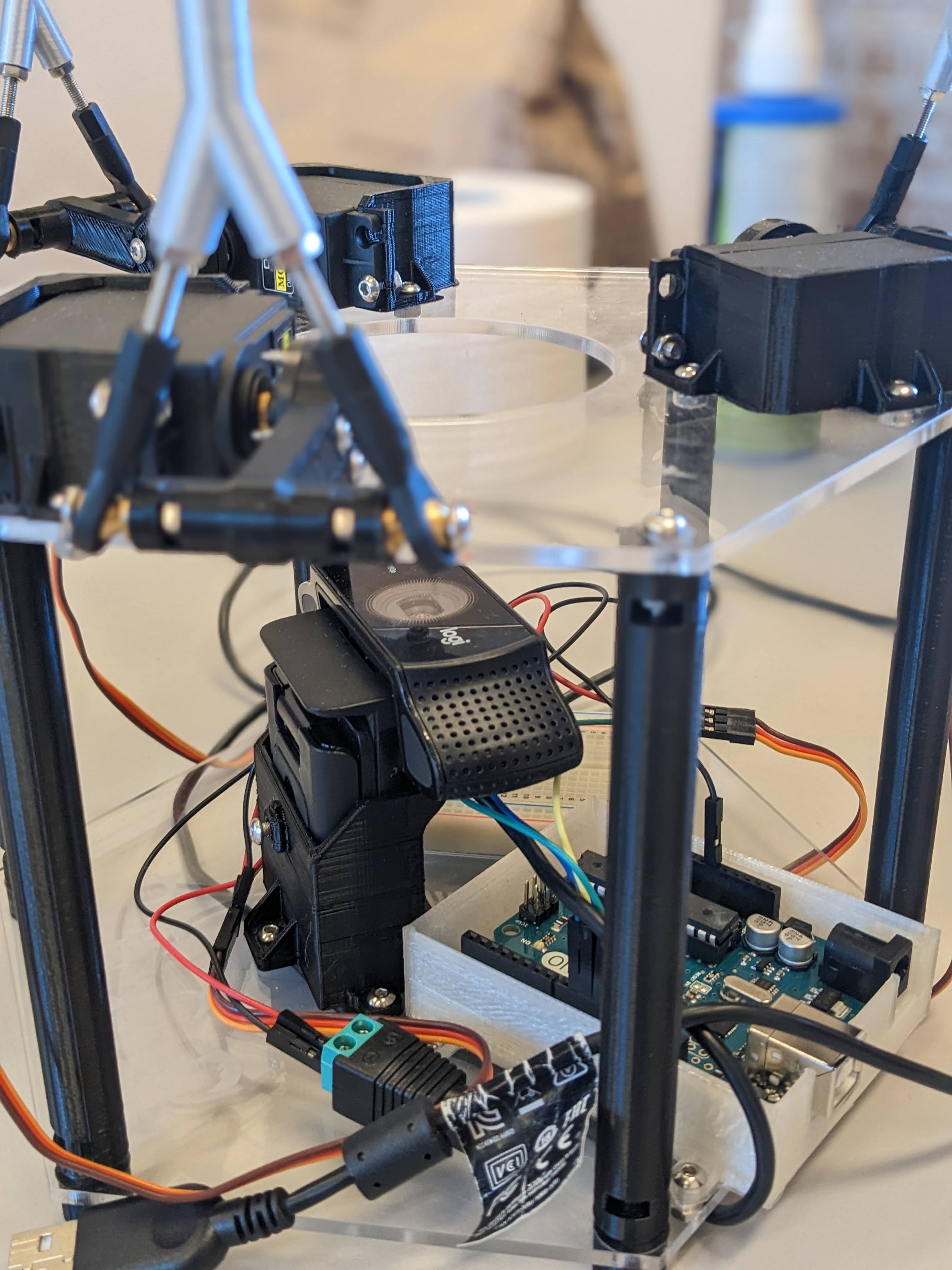

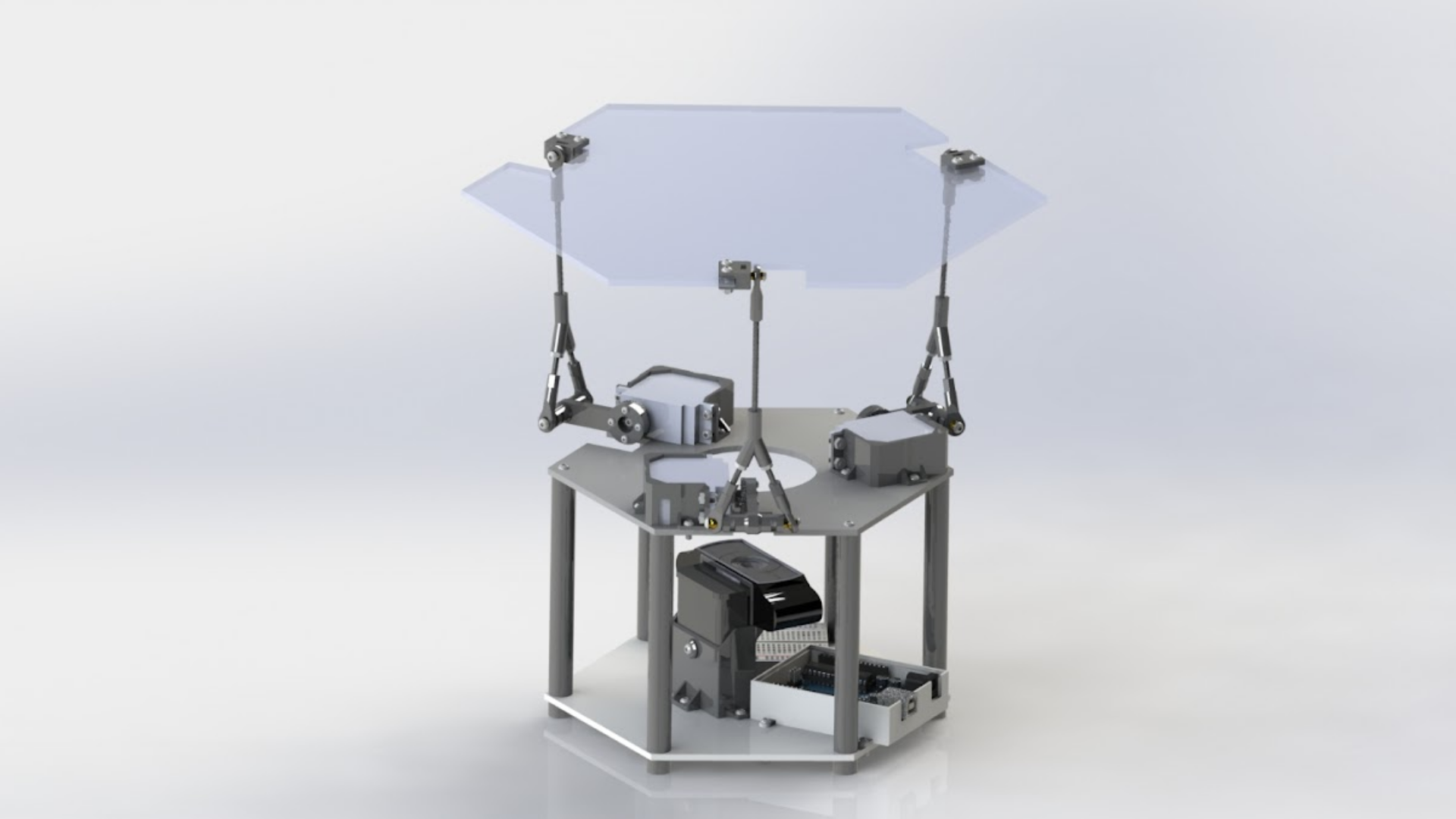
Ball-Balancing Control of a Stewart Platform
University of California, Berkeley
08/2022 - 12/2022
Keywords: Stewart Platform, PID controller, Kinematics, Robotics, Arduino, Computer Vision, C-programming, Python, Solidworks
Role
Impacts
Skills
Descriptions
Inspired by the many researches about Stewart Platforms, we decided to prototype one on our own. However, instead of using commonly used IMU sensors, we integrated computer vision to track the ball's location and implemented a PID controller to maintain the ball on the platform. In this project, I was responsible for creating the mechanical design of our robotic platform, while also helping out on the software side of the project. I was involved in determining the software stack of our controller algorithm, including the algorithms running on Python and on Arduino and the serial communication between them.